4.6. ED1 i moviment: servosistemes i motors pas a pas
4.6.1. Introducció
Amb la placa ED1, podeu generar moviments i peces cinètiques a partir de l’ús de motors. Els motors més habituals són els servos 180º i els motors pas a pas.. Els dos tipus de motors els podeu trobar al kit ED1+Art associat a l’assignatura. La diferència principal entre aquests dos motors és que el servomotor només pot girar un angle de 180º i permet girar a posicions concretes dintre d’aquest rang. Per altra banda, el motor pas a pas permet fer girs continus contant passos —és a dir, impulsos elèctrics— per establir la precisió del moviment.
Amb el servomotor que teniu al vostre equip es poden fer activitats molt suggeridores, i ara ho veurem amb un parell d’exercicis. Però, evidentment, per a fer moviments sofisticats i robotitzacions, necessitaríeu més d’un servosistema o motor. Aquests són bastant econòmics i fàcils d’aconseguir per internet o en qualsevol botiga d’electrònica.
Si reviseu la guia d’usuari que us proposàvem seguir als punts anteriors, sabreu com connectar i programar el servosistema. Però repassem-lo abans de presentar els exercicis.
Caldrà connectar-los a qualsevol dels pins digitals D1-D4 de la següent manera:
- Negre o marró: pin negatiu (-)
- Vermell: pin positiu (+)
- Blanc o taronja: pin de senyal (S)
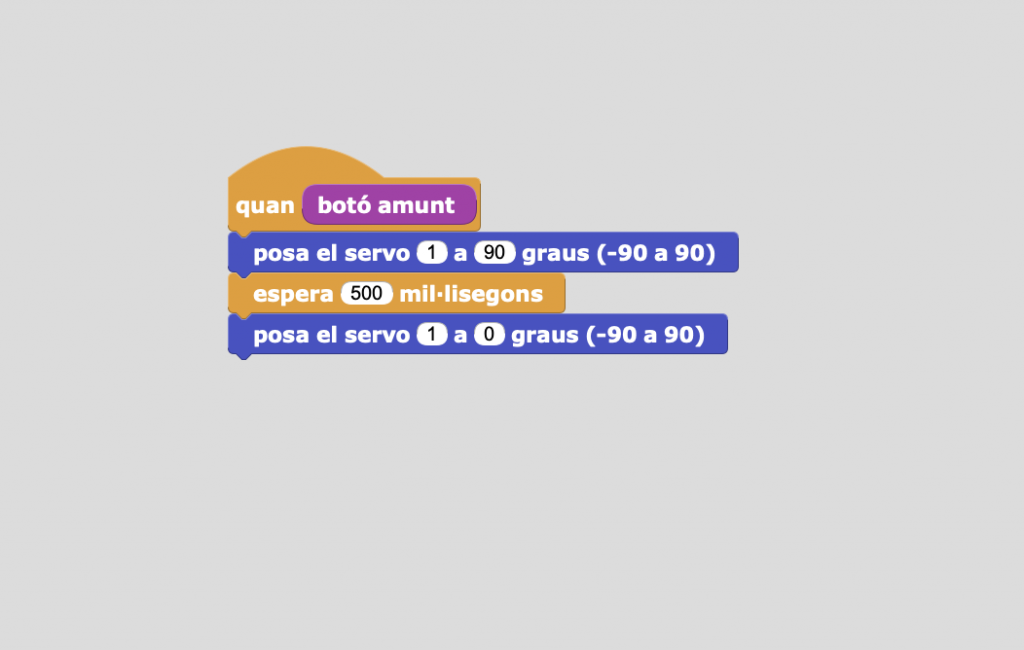
Per programar-los, us caldrà fer servir la llibreria Servo.ubl. A continuació podeu veure un exemple de com activar un servo de 180º per mitjà dels botons integrats a la placa ED1: